# Import the libraries we need to use in this lab
# Using the following line code to install the torchvision library
# !mamba install -y torchvision
!pip install torchvision==0.9.1 torch==1.8.1
import torch
import torch.nn as nn
import torchvision.transforms as transforms
import torchvision.datasets as dsets
import matplotlib.pylab as plt
import numpy as np
def show_data(data_sample):
plt.imshow(data_sample[0].numpy().reshape(IMAGE_SIZE, IMAGE_SIZE), cmap='gray')
plt.title('y = '+ str(data_sample[1]))Convolutional Neural Network with Batch-Normalization
In this lab, we will compare a Convolutional Neural Network using Batch Normalization with a regular Convolutional Neural Network
Keywords
Training Two Parameter, Mini-Batch Gradient Decent, Training Two Parameter Mini-Batch Gradient Decent

Objective for this Notebook
- Learn how to compare a Convolutional Neural Network using Batch Normalization with a regular Convolutional Neural Network to classify handwritten digits from the MNIST database..
Table of Contents
This lab takes a long time to run so the results are given. You can run the notebook your self but it may take a long time.In this lab, we will compare a Convolutional Neural Network using Batch Normalization with a regular Convolutional Neural Network to classify handwritten digits from the MNIST database. We will reshape the images to make them faster to process.
- Read me Batch Norm for Convolution Operation
- Get Some Data
- Two Types of Convolutional Neural Network
- Define Criterion function, Optimizer and Train the Model
- Analyze Results
Estimated Time Needed: 25 min
Read me Batch Norm for Convolution Operation
Like a fully connected network, we create a BatchNorm2d object, but we apply it to the 2D convolution object. First, we create objects Conv2d object; we require the number of output channels, specified by the variable OUT.
self.cnn1 = nn.Conv2d(in_channels=1, out_channels=OUT, kernel_size=5, padding=2)
We then create a Batch Norm object for 2D convolution as follows:
self.conv1_bn = nn.BatchNorm2d(OUT)
The parameter out is the number of channels in the output. We can then apply batch norm after the convolution operation :
x = self.cnn1(x)
x=self.conv1_bn(x)
Preparation
Get the Data
we create a transform to resize the image and convert it to a tensor :
IMAGE_SIZE = 16
composed = transforms.Compose([transforms.Resize((IMAGE_SIZE, IMAGE_SIZE)), transforms.ToTensor()])Load the training dataset by setting the parameters train to True. We use the transform defined above.
train_dataset = dsets.MNIST(root='./data', train=True, download=True, transform=composed)Load the testing dataset by setting the parameters train False.
# Make the validating
validation_dataset = dsets.MNIST(root='./data', train=False, download=True, transform=composed)We can see the data type is long.
# Show the data type for each element in dataset
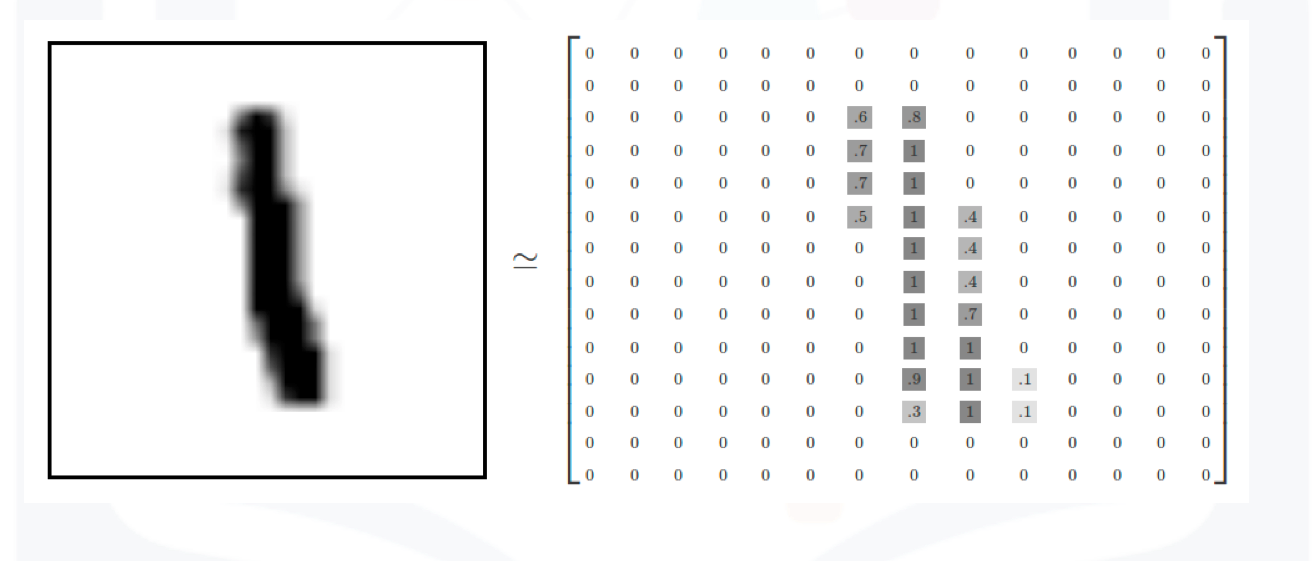
type(train_dataset[0][1])Each element in the rectangular tensor corresponds to a number representing a pixel intensity as demonstrated by the following image.
Print out the fourth label
# The label for the fourth data element
train_dataset[3][1]Plot the fourth sample
# The image for the fourth data element
show_data(train_dataset[3])The fourth sample is a “1”.
Build a Two Convolutional Neural Network Class
Build a Convolutional Network class with two Convolutional layers and one fully connected layer. Pre-determine the size of the final output matrix. The parameters in the constructor are the number of output channels for the first and second layer.
class CNN(nn.Module):
# Contructor
def __init__(self, out_1=16, out_2=32):
super(CNN, self).__init__()
self.cnn1 = nn.Conv2d(in_channels=1, out_channels=out_1, kernel_size=5, padding=2)
self.maxpool1=nn.MaxPool2d(kernel_size=2)
self.cnn2 = nn.Conv2d(in_channels=out_1, out_channels=out_2, kernel_size=5, stride=1, padding=2)
self.maxpool2=nn.MaxPool2d(kernel_size=2)
self.fc1 = nn.Linear(out_2 * 4 * 4, 10)
# Prediction
def forward(self, x):
x = self.cnn1(x)
x = torch.relu(x)
x = self.maxpool1(x)
x = self.cnn2(x)
x = torch.relu(x)
x = self.maxpool2(x)
x = x.view(x.size(0), -1)
x = self.fc1(x)
return xBuild a Convolutional Network class with two Convolutional layers and one fully connected layer. But we add Batch Norm for the convolutional layers.
class CNN_batch(nn.Module):
# Contructor
def __init__(self, out_1=16, out_2=32,number_of_classes=10):
super(CNN_batch, self).__init__()
self.cnn1 = nn.Conv2d(in_channels=1, out_channels=out_1, kernel_size=5, padding=2)
self.conv1_bn = nn.BatchNorm2d(out_1)
self.maxpool1=nn.MaxPool2d(kernel_size=2)
self.cnn2 = nn.Conv2d(in_channels=out_1, out_channels=out_2, kernel_size=5, stride=1, padding=2)
self.conv2_bn = nn.BatchNorm2d(out_2)
self.maxpool2=nn.MaxPool2d(kernel_size=2)
self.fc1 = nn.Linear(out_2 * 4 * 4, number_of_classes)
self.bn_fc1 = nn.BatchNorm1d(10)
# Prediction
def forward(self, x):
x = self.cnn1(x)
x=self.conv1_bn(x)
x = torch.relu(x)
x = self.maxpool1(x)
x = self.cnn2(x)
x=self.conv2_bn(x)
x = torch.relu(x)
x = self.maxpool2(x)
x = x.view(x.size(0), -1)
x = self.fc1(x)
x=self.bn_fc1(x)
return xFunction to train the model
def train_model(model,train_loader,validation_loader,optimizer,n_epochs=4):
#global variable
N_test=len(validation_dataset)
accuracy_list=[]
loss_list=[]
for epoch in range(n_epochs):
for x, y in train_loader:
model.train()
optimizer.zero_grad()
z = model(x)
loss = criterion(z, y)
loss.backward()
optimizer.step()
loss_list.append(loss.data)
correct=0
#perform a prediction on the validation data
for x_test, y_test in validation_loader:
model.eval()
z = model(x_test)
_, yhat = torch.max(z.data, 1)
correct += (yhat == y_test).sum().item()
accuracy = correct / N_test
accuracy_list.append(accuracy)
return accuracy_list, loss_listDefine the Convolutional Neural Network Classifier, Criterion function, Optimizer and Train the Model
There are 16 output channels for the first layer, and 32 output channels for the second layer
# Create the model object using CNN class
model = CNN(out_1=16, out_2=32)Define the loss function, the optimizer and the dataset loader
criterion = nn.CrossEntropyLoss()
learning_rate = 0.1
optimizer = torch.optim.SGD(model.parameters(), lr = learning_rate)
train_loader = torch.utils.data.DataLoader(dataset=train_dataset, batch_size=100)
validation_loader = torch.utils.data.DataLoader(dataset=validation_dataset, batch_size=5000)Train the model and determine validation accuracy technically test accuracy (This may take a long time)
# Train the model
accuracy_list_normal, loss_list_normal=train_model(model=model,n_epochs=10,train_loader=train_loader,validation_loader=validation_loader,optimizer=optimizer)Repeat the Process for the model with batch norm
model_batch=CNN_batch(out_1=16, out_2=32)
criterion = nn.CrossEntropyLoss()
learning_rate = 0.1
optimizer = torch.optim.SGD(model_batch.parameters(), lr = learning_rate)
accuracy_list_batch, loss_list_batch=train_model(model=model_batch,n_epochs=10,train_loader=train_loader,validation_loader=validation_loader,optimizer=optimizer)Analyze Results
Plot the loss with both networks.
# Plot the loss and accuracy
plt.plot(loss_list_normal, 'b',label='loss normal cnn ')
plt.plot(loss_list_batch,'r',label='loss batch cnn')
plt.xlabel('iteration')
plt.title("loss")
plt.legend()plt.plot(accuracy_list_normal, 'b',label=' normal CNN')
plt.plot(accuracy_list_batch,'r',label=' CNN with Batch Norm')
plt.xlabel('Epoch')
plt.title("Accuracy ")
plt.legend()
plt.show()We see the CNN with batch norm performers better, with faster convergence.